(^∇^*=) This page is rather long! Free free to select the option from the navigation bar below. (=*^∇^)
What is this page about
As the name suggest. This page is for assembling the parts I 3d printed out. For assembly, you would need super glue to help stick the parts together.
Robot Arm assembly

Firstly, superglue the back arms together.Use the flat surface at the sides as guild to get a perfect alignment.
 |
 |
|---|
Sand the top surface uniformly and ensure there are no gap in between the wrist and arm. Glue the inside of the wrist so the build looks better.
 |
 |
|---|
Before assembling the fingers, tie 2 fishing lines to the finger tip to ease the assembly process.
Now place a rod through the holes located at the side of the finger and wrist.
The length of the line should be as long as the arm to allow adjustment later. Tie it around the wrist to keep it in place.
Ensure your fingers are working before proceeding.
 |
 |
|---|
Using the push pins, lock the wrist to the arm before pushing the fishing line through.

This is how it should look like at this point
Electronic fitting
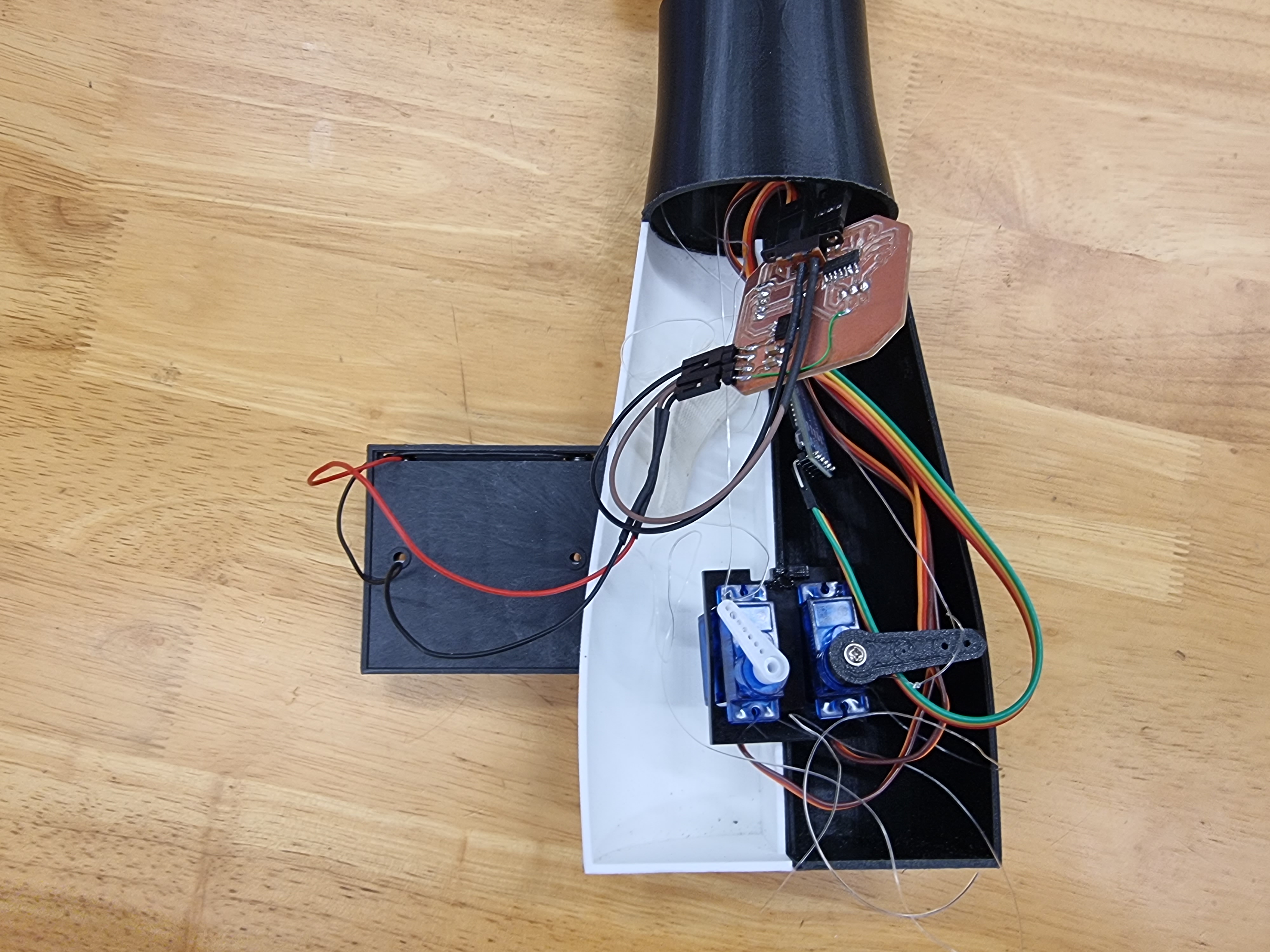
Due to me rushing my work, I have forgotten to set aside an area for the PCB to be mounted onto! I would fix this when I have the time.
Hick-ups

Somebody dropped my hand on the floor and broke the finger. I had to reprint this quickly and get it replaced
Finger Testing
I am testing the fingers after securing them to the servos.
Final Test